⑧飛行のため装置を機体に搭載し、フラコンの緑ランプが点灯しGPSの
青LEDが点滅し始めたら、GPS初期設定完了で飛行を開始します。
初回はGPSが衛星情報を得るために10~30分かかります。
同一場所で複数回飛ばすと徐々に精度が上がって来ます。
フラコンの設置場所はカーボン壁や金属、電池などから10cm程度離れ
いる方がGPSアンテナの受信性能が良くなります。
離陸前にパイロット位置から50m以内で再度電源を接続します。
50m以上離れすぎると、リボン図の原点が指定範囲を超えるため
プロッターで見る時に通常の演技枠が見えなくなります。
⑨飛行後フラコンの電源をOFFにするとSDカードに「.bin」ファイルが作成さ
れます。
⑩フラコンからSDカードを取り出し、カードリーダーに挿入して
スマホ、タブレット、PCに接続します。
中華製スマホやタブレットはUSB機能が無い製品があります。
国産でUSBホスト機能があるものを選定しましょう。
| 滑走路名前 | Pilot | Center | |||
| 磐田 | 34.799955 | 137.828458 | 34.800211 | 137.826875 | |
| 豊田 | 35.029540 | 137.162499 | 35.029387 | 137.162764 | |
| 静岡 | 35.0156406 | 138.3619137 | 35.0154922 | 138.3621950 | |
| 大井川 | 34.8220806 | 138.2041687 | 34.8236269 | 138.2039313 | |
| 富士川 | 35.120307 | 138.641546 | 35.120328 | 138.641237 | |
| 西濃 | 35.273358 | 136.609776 | 35.273306 | 136.610155 | |
| GMH | 35.316270 | 136.669230 | 35.316427 | 136.668900 | |
| 東海 | 35.1611294 | 138.6503037 | 35.1612485 | 136.6504461 | |
| 宇都宮 | 36.590743 | 139.965950 | 36.590729 | 139.966225 | |
| 浜松 | 34.770515 | 137.814247 | 34.770476 | 137.814443 | |
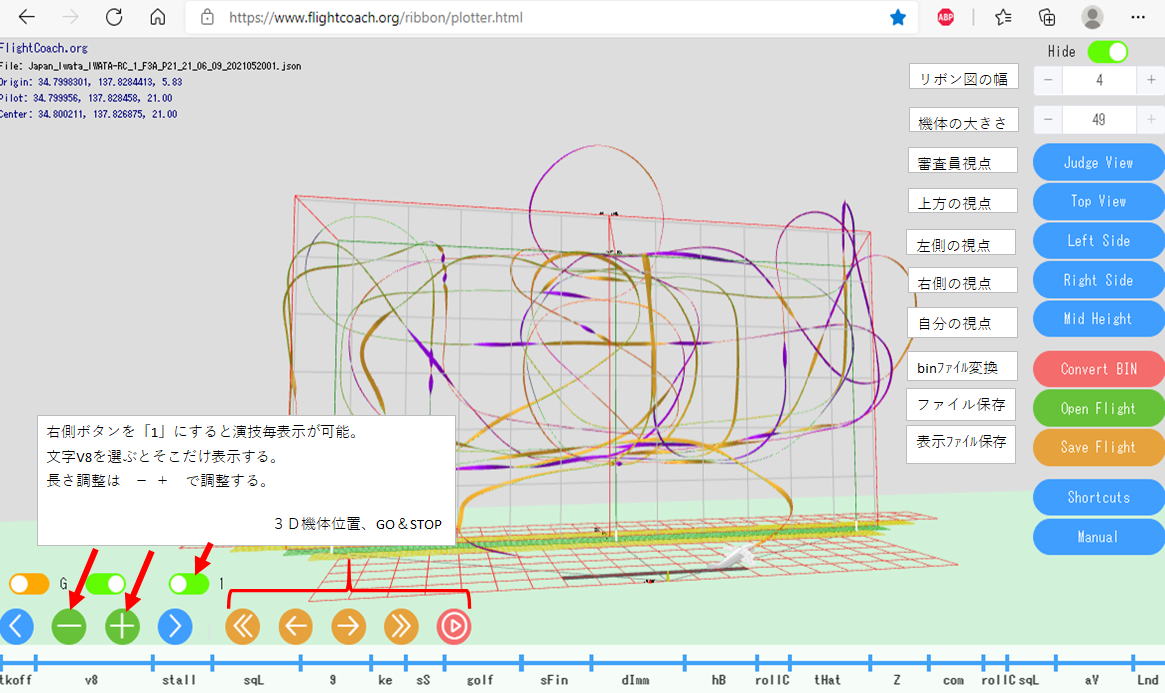
⑪PCかタブレットで「The Plotter」を立ち上げます。一度立ち上げてお
くと次回はインターネットに接続してなくても使えるので滑走路でも
便利です。ブックマークやアイコンで画面に登録すると便利です。
https://www.flightcoach.org/ribbon/plotter.html
画面右端の赤いボタン「Convert bin」をタップすると、binファイル選定する
画面が出るので、SDカードリーダー中のbinファイルを選びます
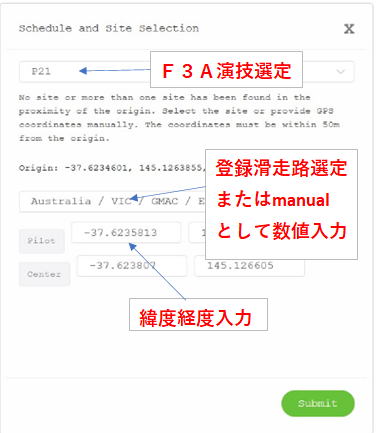
⑫選定後、演技(P-21)や滑走路を選定する設定画面が現れるので、P-25
とmanualを選定し、パイロットとセンターの緯度経度を入力します。
一度入力すると記憶されます。
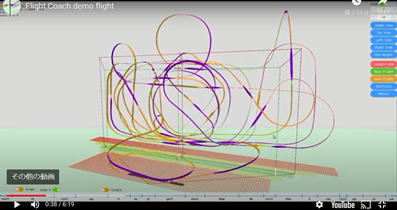
⑬しばらく待つと3Dリボン図が画面に表示されます。
⑭右端のSAVEボタンで表示中の3Dリボン図が「*****.json」と言う形
でスマホのダウンロードフォルダーに保存されます。
SDカードにも保存しておけば、パソコンに移動してマウス等を使って自在に
見ることが可能となります。
⑮3Dリボン図はマウスとSHIFTキー、CTRLキーの組み合わせで自在に
動かすことができます。右の青いボタンでジャッジ視点、上側、左右
側視点等に一気に切り替えも可能です。
拡大縮小はマウスのローラーで出来ます。
⑯下にあるSplitterボタンはp-21の演技毎の表示用で、離陸から順次選定して
D,Fキーで縮小、延長が可能となります。
リボン図で D:短縮 F:延伸 となっています。
操作には慣れが必要なので、繰り返し表示して習熟してください。
センター位置に関してはさほど精度が良くないので、実際に飛行して
垂直降下や垂直上昇での記録とセンター位置を比較して微調整しています。
センターの微調整はSetting-MoveLRの数値で移動できます。
⑰テンプレートは模範演技パターンを3Dリボン図で見ることができます。
2021.07より閲覧可能となりました。
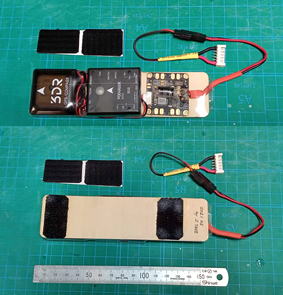
①フライトコントローラ:PIXHAWK-miniを入手する。
専用のGPSアンテナと、電圧変換機(7v~42v対応) 付き。
②装置に電源を接続して磁気コンパスと加速度センサーを校正します。
ミッションプランナーと言うドローン用ソフトを利用します。
③飛行機用専用パラメータを入力して、フラコンを上下左右に振り回して
位置と加速度センサー数値を校正後、設定します。
④校正が出来たら、マイクロSDカードを挿入して、機体へ搭載します。
設定完了でミッションプランナー上で方位やGPS位置が確認できます。
パスファインダーとVLVについては構成済みで販売されているようです。
大まかな使い方は下記です。

機体進行方向


<参考:近隣滑走路緯度経度> 2022.09.04更新

フライト・コーチ 取扱説明書
フライトコーチはオーストラリアのF3Aトップ選手のArtur Uzieblo氏が本業のソフト開発環境を使って2021年に作り上げたGPSと慣性航法(IMUセンサー)による航跡をリボン図で表示するアプリケーションです。推奨製品
写真のPixhawk-mini+GPS最新版M10Qアンテナ(廃版)です。
VLV製 フライトコーチ
韓国製 パスファインダー
注記:記録精度は飛行する場所のGPS衛星の電波状態に依存し
ますので、電波状態が悪いと正常に記録できません。
地形、電波塔、送電線、ビル壁や山、水面反射の影響で
正常に記録できないケースもあります。


END